
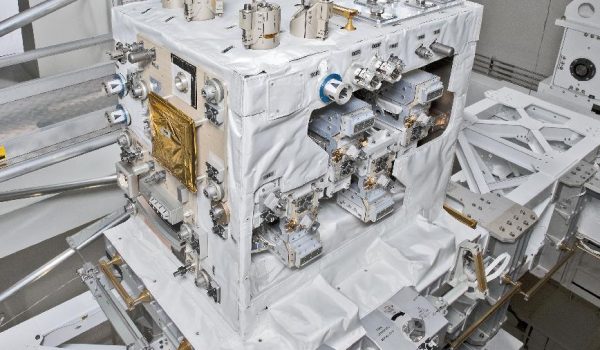
The Robotic Refueling Mission payload, arrived on the ISS with STS-135 (Credits: NASA).
The next step for NASA’s Robotic Refueling Mission (RRM) will be a ground based simulation, in which a corrosive fuel oxidizer will be pumped into a mock-up satellite, due to take place in the second semester of 2013.
“We’re going to attempt to demonstrate nitrogen tetroxide transfer,” said Frank Cepollina, associate director for the Satellite Servicing Capabilities Office at the Goddard Space Flight Center and principal investigator for RRM. “But instead of the robot in space being operated from Houston, the master will be at Goddard, and the robotic slave will be at Kennedy.”
The RRM demonstration will utilize nitrogen tetroxide, one of the dangerous chemicals used aboard real spacecraft as an oxidizer. The robot and the model satellite will be placed at the Kennedy Space Center, in Florida, while the operator will give commands from the Goddard Space Flight Center, in Maryland, 1,400 kilometers away. The test is set to prove that the robotic operation is able to safely store, handle and if necessary, clean up the hazardous and corrosive fluid. It will rely on existing robotic hardware with custom control software that is currently being written. In order to perform the transfer of the fluid, the test will also need nitrogen tetroxide pumps, which have not yet been finished and delivered.
This experiment is follow up of the January demonstration on the International Space Station in which an operator at the Johnson Space Center used the DEXTRE robotic arm to transfer an ethanol-based fluid into a model satellite. Ethanol was used to simulate the fuel because it has approximately the same density as hydrazine which is a common and toxic spacecraft propellant, and is considered too dangerous to test near the ISS crew.
NASA has spent $41.8 million to build, launch and operate RRM hardware from 2009 to 2013. The next shipments of RRM hardware for a second set of demonstration missions are scheduled for August 2013, aboard the Japanese cargo mission, and in 2014. The new set of RRM demonstrations are planned to be conducted in 2015.
RRM project’s goal is to develop technology needed for robotic satellite servicing, particularly of the expensive geostationary communications satellites which were not originally designed to be refueled or repaired.
Below: Previous DEXTRE experiment conducted on ISS











































































































![A trajectory analysis that used a computational fluid dynamics approach to determine the likely position and velocity histories of the foam (Credits: NASA Ref [1] p61).](http://www.spacesafetymagazine.com/wp-content/uploads/2014/05/fluid-dynamics-trajectory-analysis-50x50.jpg)



Leave a Reply